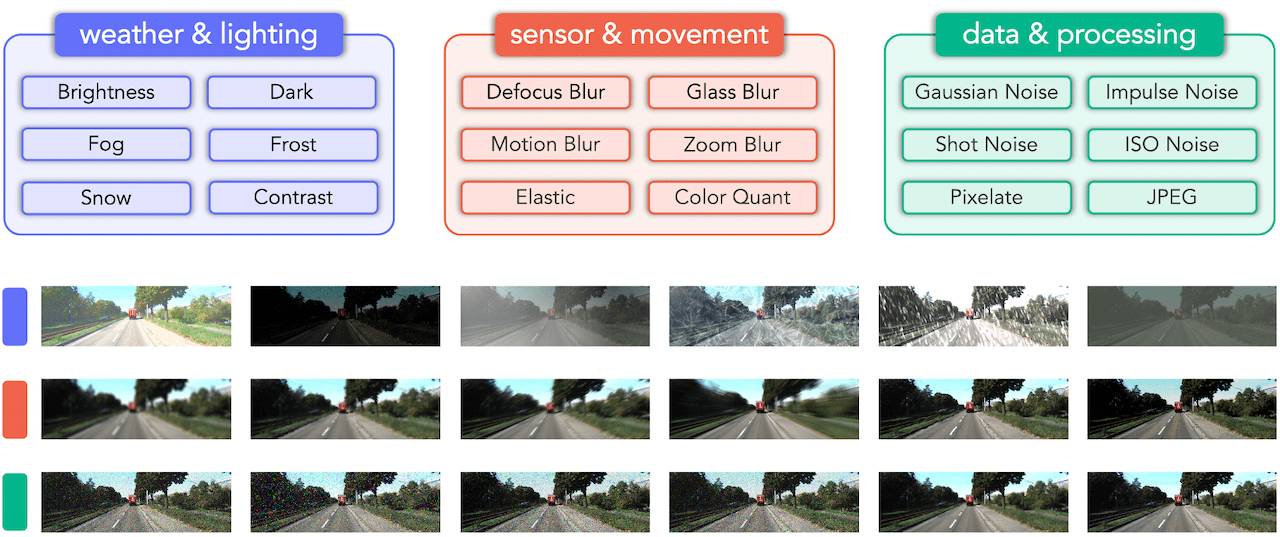
Depth estimation from monocular images plays an important role in real-world visual perception systems. Existing learning-based depth estimation models are trained and tested on meticulously cleaned data while ignoring out-of-distribution (OoD) situations. Common corruptions, however, tend to occur in practical scenarios, especially for safety-critical applications like autonomous driving. To fill in this gap, we present a comprehensive robustness test suite dubbed RoboDepth consisting of 18 corruptions from three categories: i) weather and lighting conditions; ii) sensor failure and movement; and iii) data processing issues. Then, we conduct a comprehensive benchmark on 42 existing depth estimation models from indoor and outdoor scenes, to evaluate their robustness under corruptions. Our benchmark results indicate that, due to the lack of a suitable robustness evaluation toolkit, state-of-the-art depth estimation models are at risk of being vulnerable to common corruptions. We further make in-depth discussions on the design considerations of building more robust depth estimation models, from aspects including pre-training, augmentation, modality, model capacity, and learning paradigm. We hope our benchmark can lay a solid foundation and facilitate robust OoD depth estimation.
Coming soon!
Coming soon!
Coming soon!
Coming soon!
@article{kong2023robodepth,
title = {RoboDepth: Robust Out-of-Distribution Depth Estimation under Corruptions},
author = {Kong, Lingdong and Xie, Shaoyuan and Hu, Hanjiang and Cottereau, Benoit and Ng, Lai Xing and Ooi, Wei Tsang},
journal = {arXiv preprint arXiv:23xx.xxxxx},
year = {2023},
}