Lingdong Kong
![]()
![]()
![]()
![]()
![]()
I am a Ph.D. candidate in the Department of Computer Science at the National University of Singapore, advised by Prof. Wei Tsang Ooi, Prof. Benoit Cottereau, and Dr. Lai Xing Ng. I also collaborate closely with Prof. Ziwei Liu from Nanyang Technological University, Singapore.
I am an intern at Apple, working with Dr. Afshin Dehghan and Dr. Josh Susskind.
My research focuses include spatial intelligence, multimodal large language models, and 3D/4D world modeling and evaluations.
I am the recipient of the National Scholarship (Ministry of Education, 2019), Research Achievement Award (NUS Computing, 2023), Dean's Graduate Research Excellence Award (NUS Computing, 2024), DAAD AInet Fellowship (DAAD, 2025), and Apple Scholars in AI/ML Ph.D. Fellowship (Apple, 2025).
I have been fortunate to collaborate with Apple Machine Learning Research, NVIDIA Research, ByteDance AI Lab, OpenMMLab, MMLab@NTU, and Motional.
News
- [05/2026] - Recognized as an Outstanding Reviewer by CVPR 2026.
- [04/2026] - WorldLens was selected for oral presentation at CVPR 2026.
- [04/2026] - U4D was selected as a highlight at CVPR 2026.
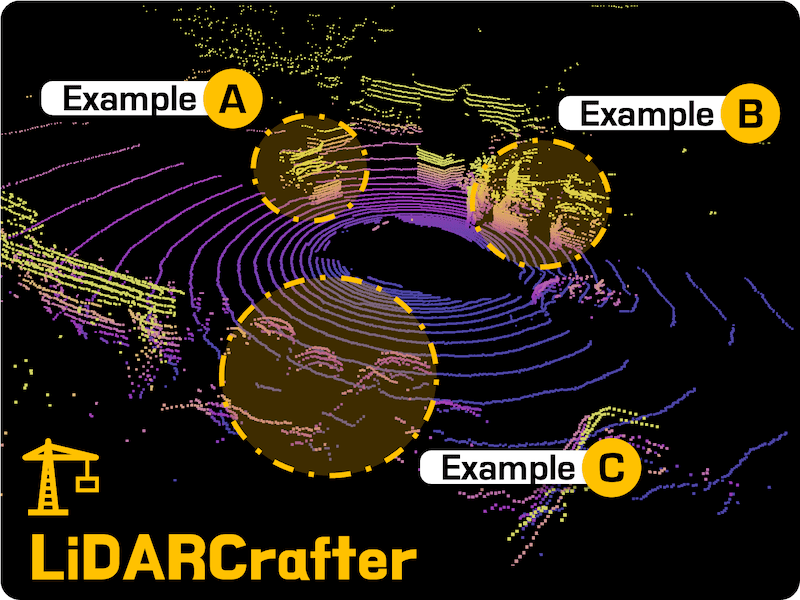
- [11/2025] - LiDARCrafter was selected for oral presentation at AAAI 2026.
- [11/2025] - Selected for Global Young Scientists Summit (GYSS) 2026.
- [09/2025] - Talk2Event was selected as a spotlight at NeurIPS 2025.
- [09/2025] - Selected for Doctoral Consortium at ICCV 2025.
- [06/2025] - We are hosting the RoboSense Challenge at IROS 2025.
- [05/2025] - Recognized as an Outstanding Reviewer by CVPR 2025.
-
[03/2025] - Selected as an Apple Ph.D. Scholar in AI/ML by
 Apple.
Apple.
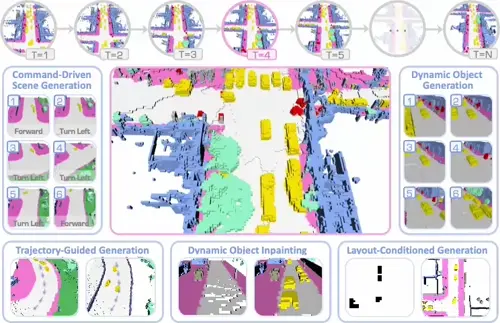
- [02/2025] - DynamicCity was selected as a spotlight at ICLR 2025.
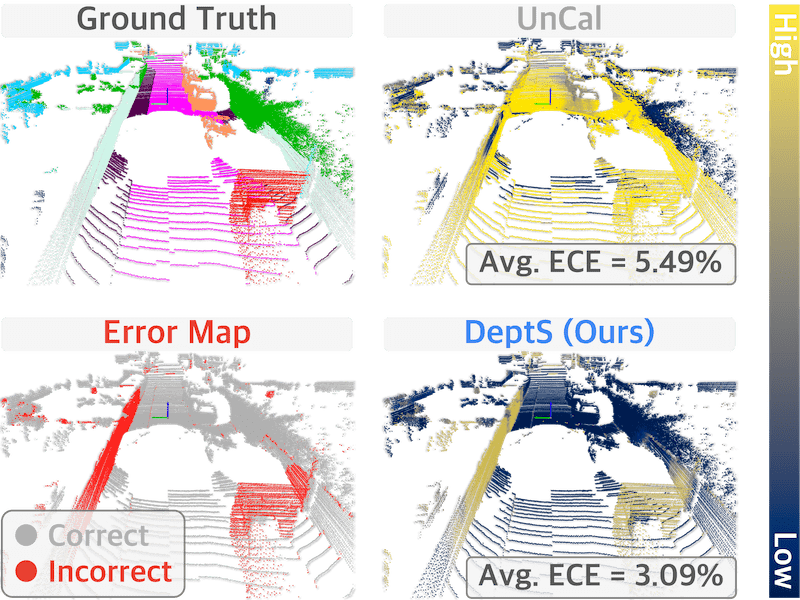
- [01/2025] - Calib3D was selected for oral presentation at WACV 2025.
- [09/2024] - Place3D was selected as a spotlight at NeurIPS 2024.
- [04/2024] - OpenESS was selected as a highlight at CVPR 2024.
- [11/2023] - We are hosting the RoboDrive Challenge at ICRA 2024.
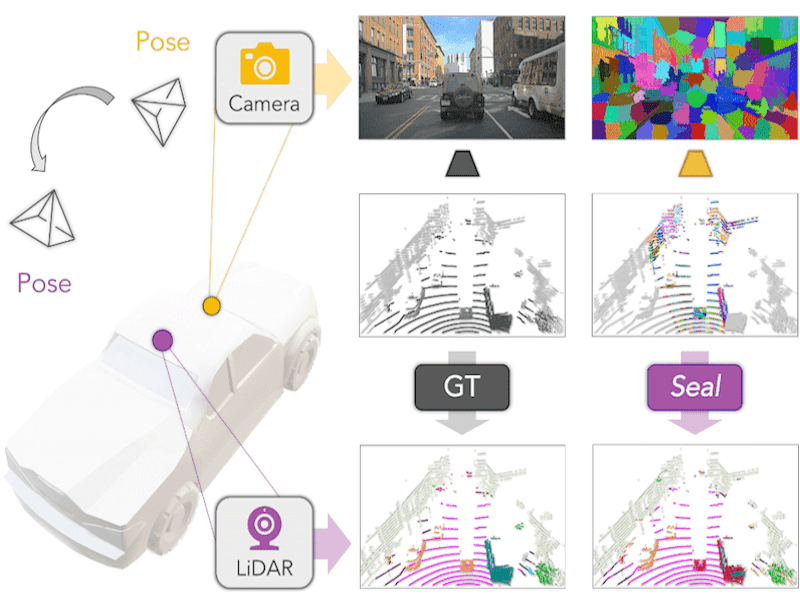
- [09/2023] - Seal was selected as a spotlight at NeurIPS 2023.
- [03/2023] - LaserMix was selected as a highlight at CVPR 2023.
Research Highlights
Industrial Experience
Apple
Apple Scholar in AI/ML- Vision-language models, multimodal scene understanding.
- Mentor: Dr. Afshin Dehghan and Dr. Josh Susskind.
Xiaomi EV
Research Intern- Embodied foundation models for robotics and autonomous driving.
- Mentor: Dr. Long Chen
TikTok Global E-Commerce
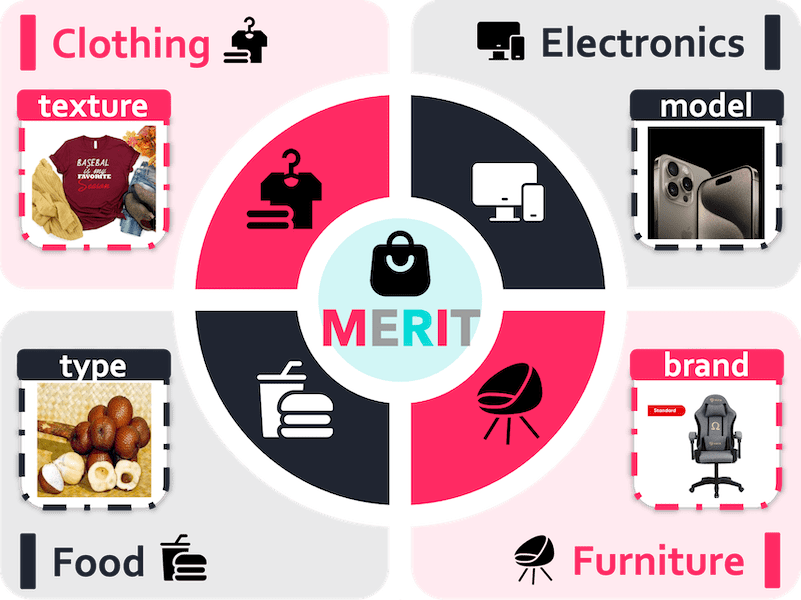
Machine Learning Engineer Intern- Semantic retrieval from multi-lingual multi-condition query.
- Mentor: Tianshu Yang and Zhihui Zhang
NVIDIA Research
Research Intern- Vision-language-action models for autonomous systems.
- Mentor: Dr. Boris Ivanovic.
OpenMMLab
Research Intern- MMDetection3D: open-source 3D perception toolbox and benchmark.
- Mentor: Dr. Wenwei Zhang and Dr. Kai Chen.
ByteDance AI Lab
Research Scientist Intern- Action recognition, video understanding, domain adaptation.
- Mentor: Dr. Pengfei Wei.
Motional
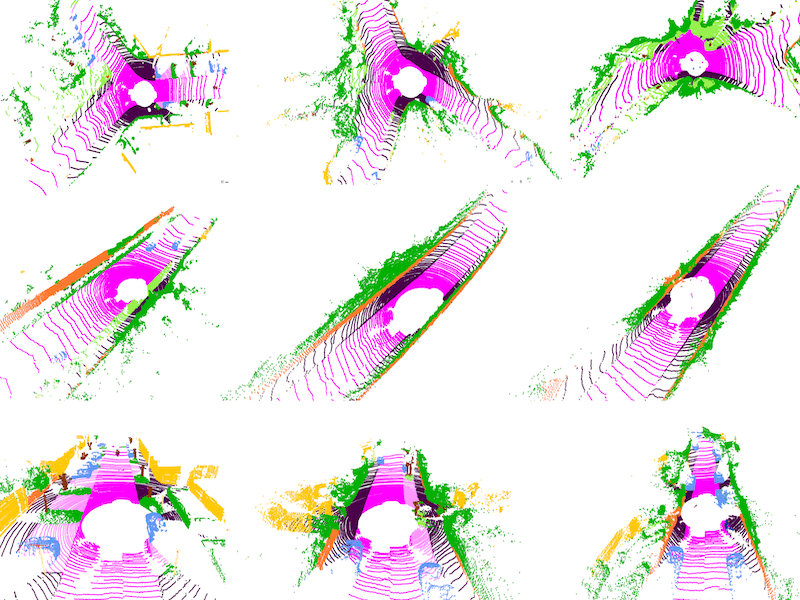
Autonomous Vehicle Intern- LiDAR-based 3D semantic segmentation for autonomous vehicles.
- Mentor: Dr. Venice Erin Liong.
Recent Publications
* equal contributions ‡ project lead § corresponding author
U4D: Uncertainty-Aware 4D World Modeling from LiDAR Sequences

AadSFormer: Adaptive Serialized Transformers for Monocular Semantic Scene Completion from Indoor Environments
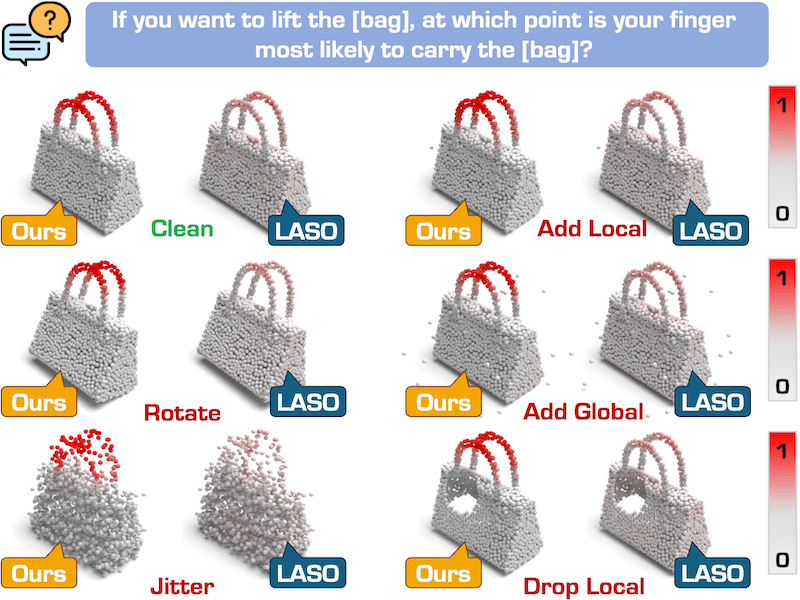
EventDrive: Event Cameras for Vision-Language Driving Intelligence











Veila: Scaling Diffusion Models for Panoramic LiDAR Point Cloud Generation from a Single Image
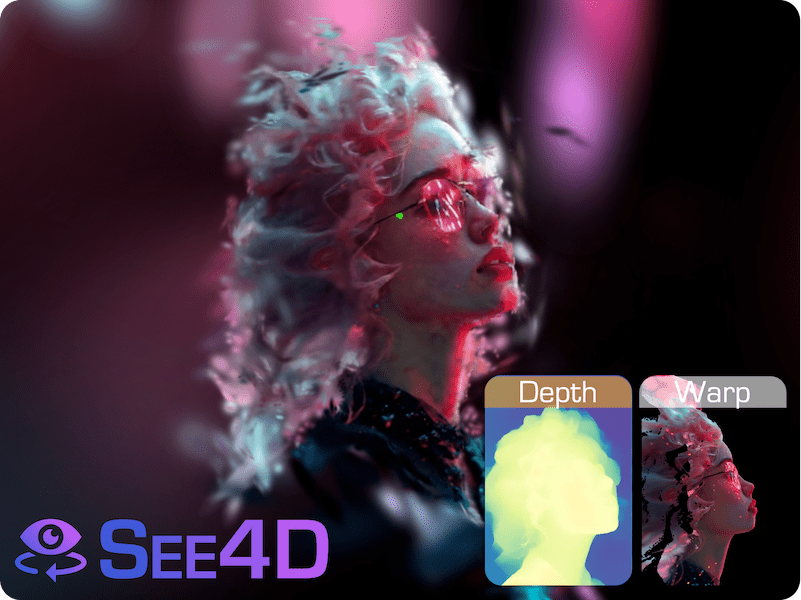
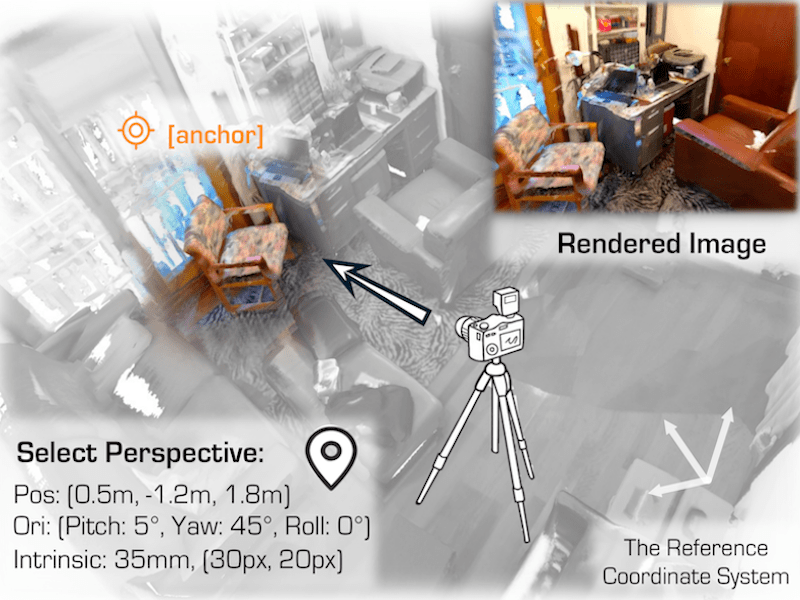
See4D: Pose-Free 4D Generation via Auto-Regressive Video Inpainting
Enhanced Spatiotemporal Consistency for Image-to-LiDAR Data Pretraining
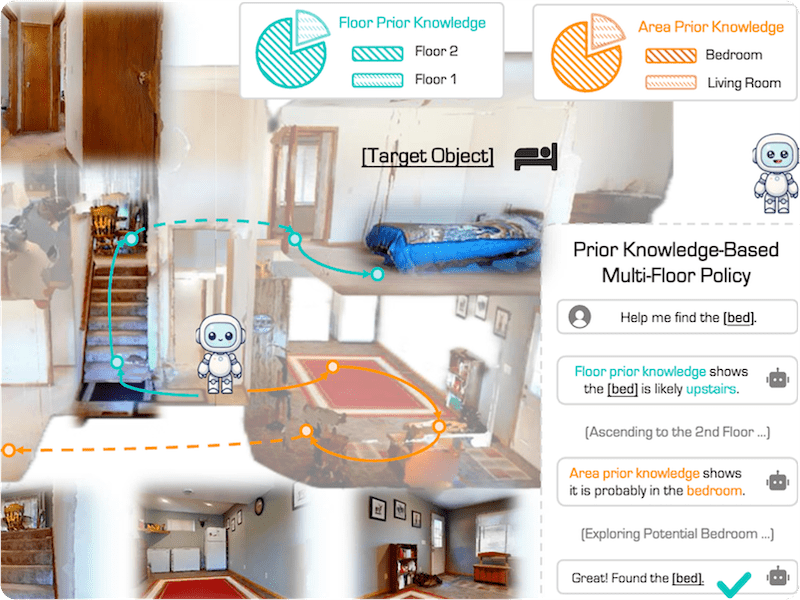
Stairway to Success: An Online Floor-Aware Zero-Shot Object-Goal Navigation Framework via LLM-Driven Coarse-to-Fine Exploration
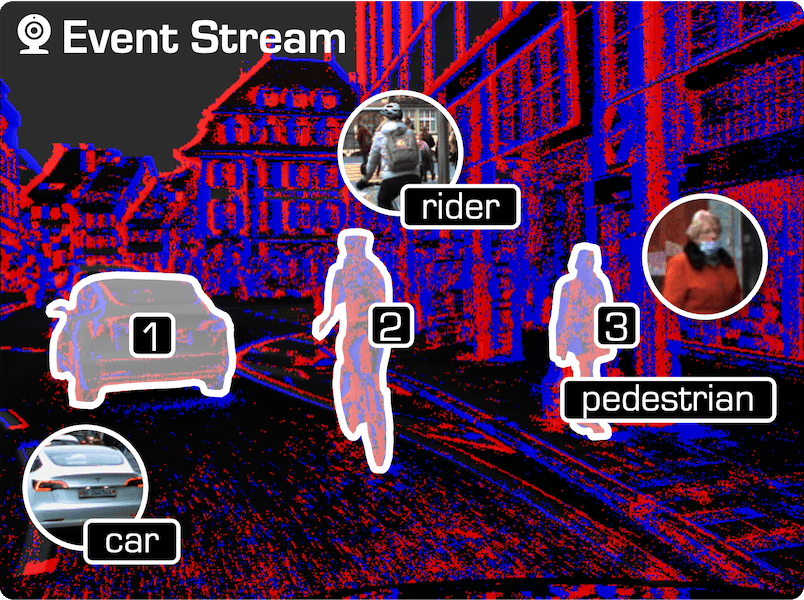
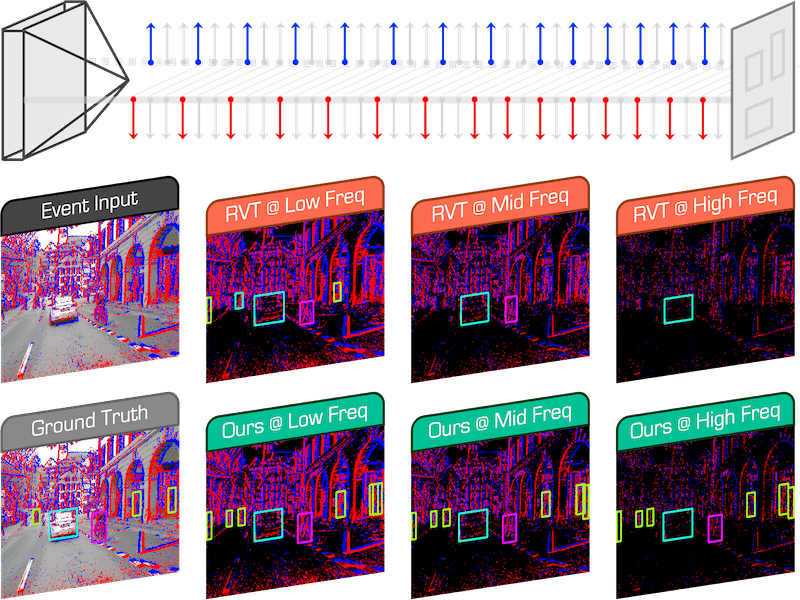
FlexEvent: Towards Flexible Event-Frame Object Detection at Varying Operational Frequencies
MonoMRN: Monocular Semantic Scene Completion via Masked Recurrent Networks
SafeMap: Robust HD Map Construction from Incomplete Observations
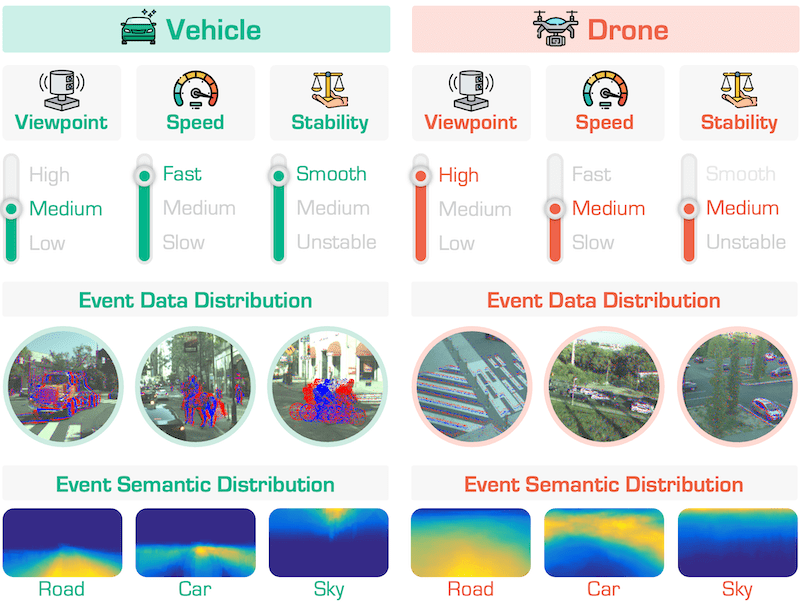
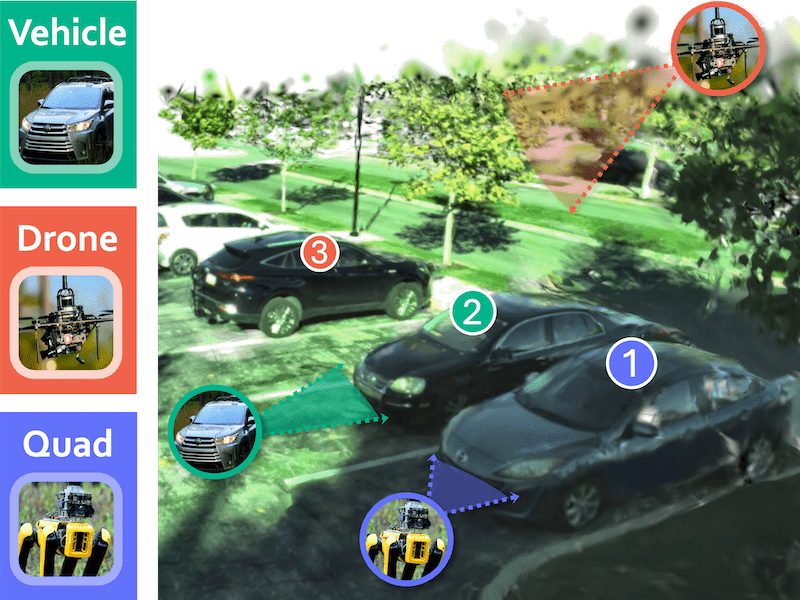
EventFly: Event Camera Perception from Ground to the Sky
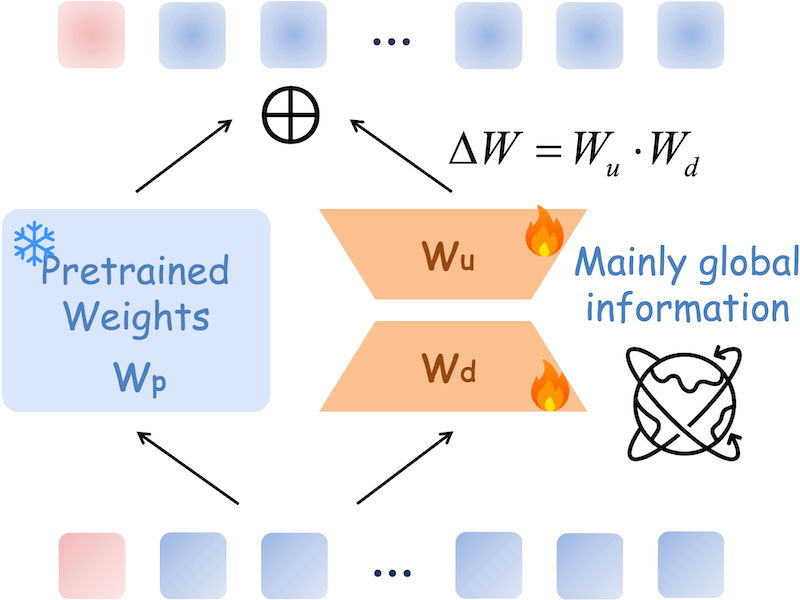
PointLoRA: Low-Rank Adaptation with Token Selection for Point Cloud Learning
LargeAD: Large-Scale Cross-Sensor Data Pretraining for Autonomous Driving
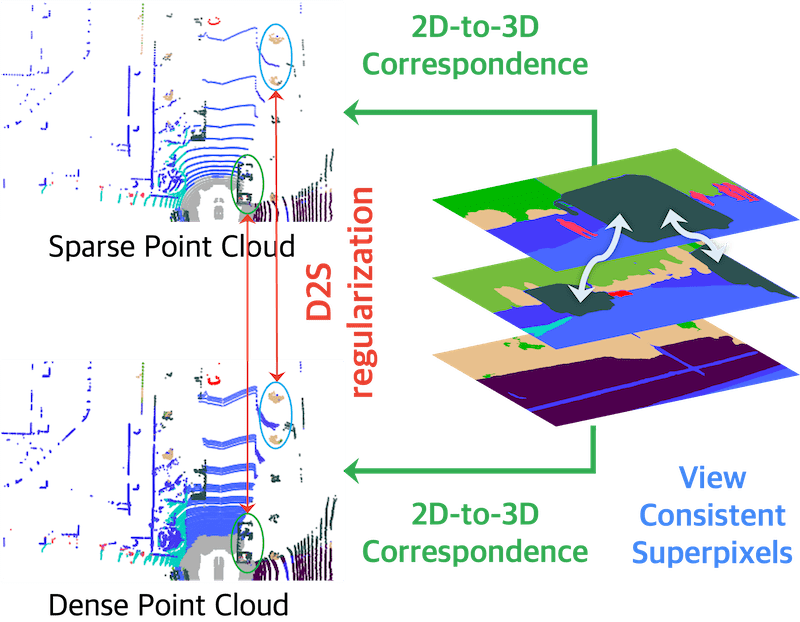
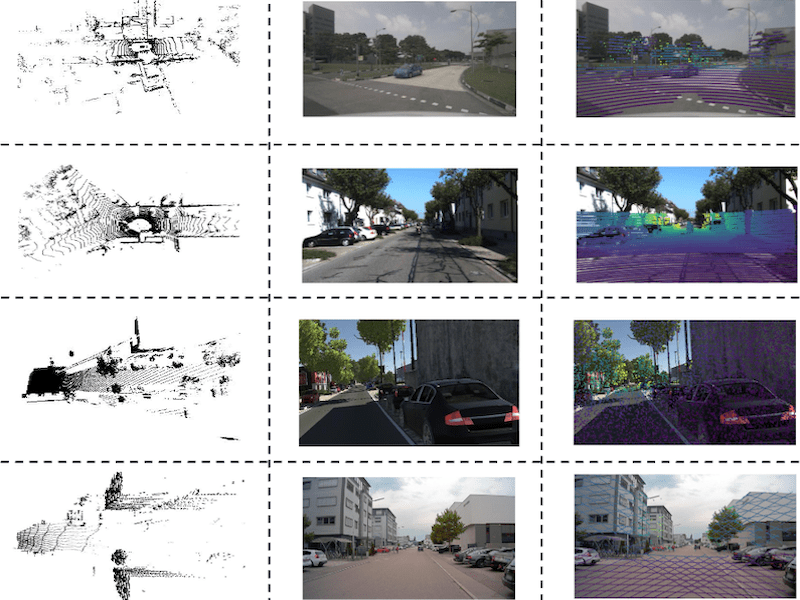
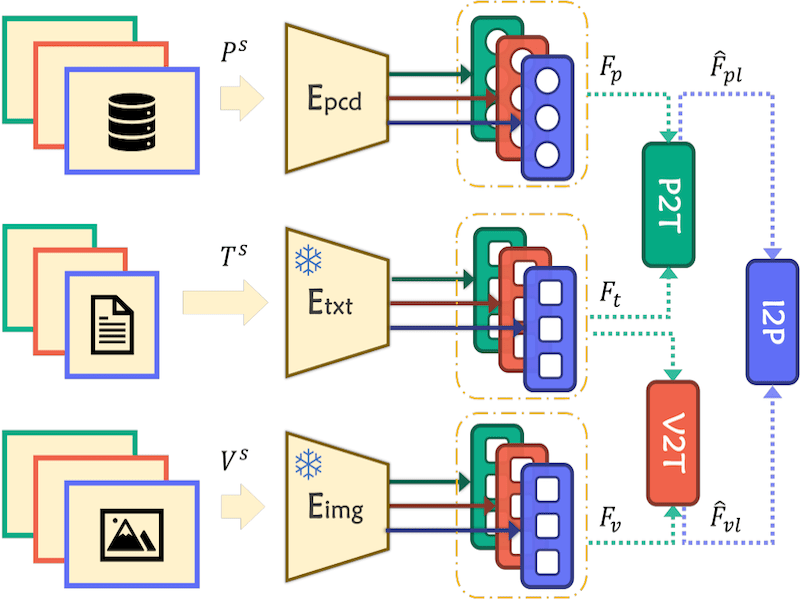
Multi-Modal Data-Efficient 3D Scene Understanding for Autonomous Driving
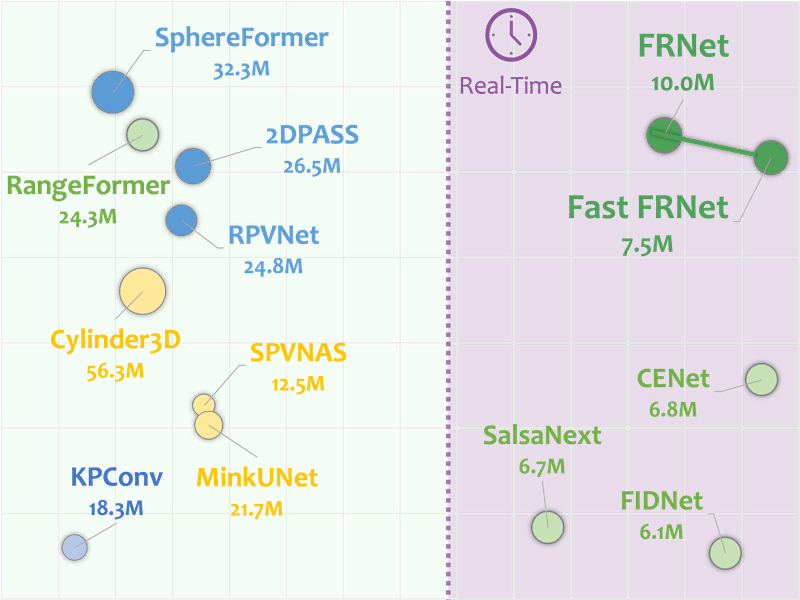
FRNet: Frustum-Range Networks for Scalable LiDAR-Based Semantic Segmentation

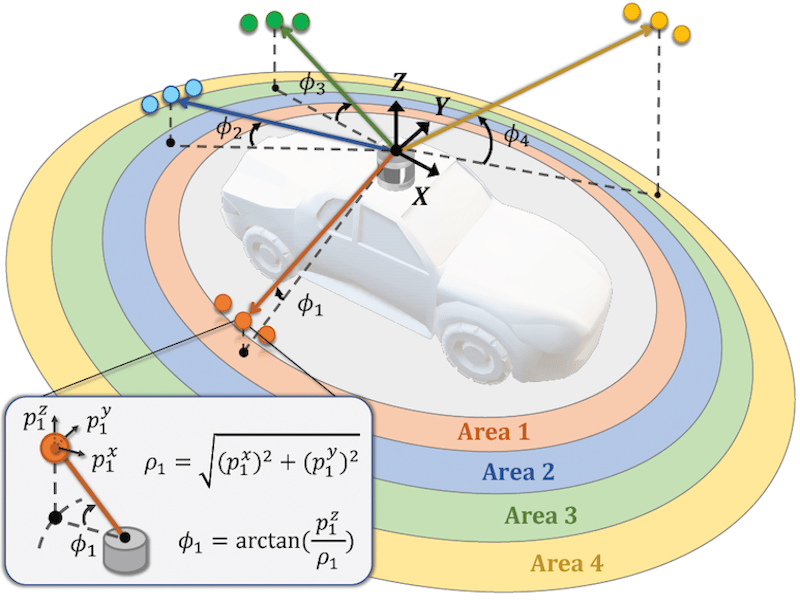
NUC-Net: Non-Uniform Cylindrical Partition Networks for Efficient LiDAR Semantic Segmentation
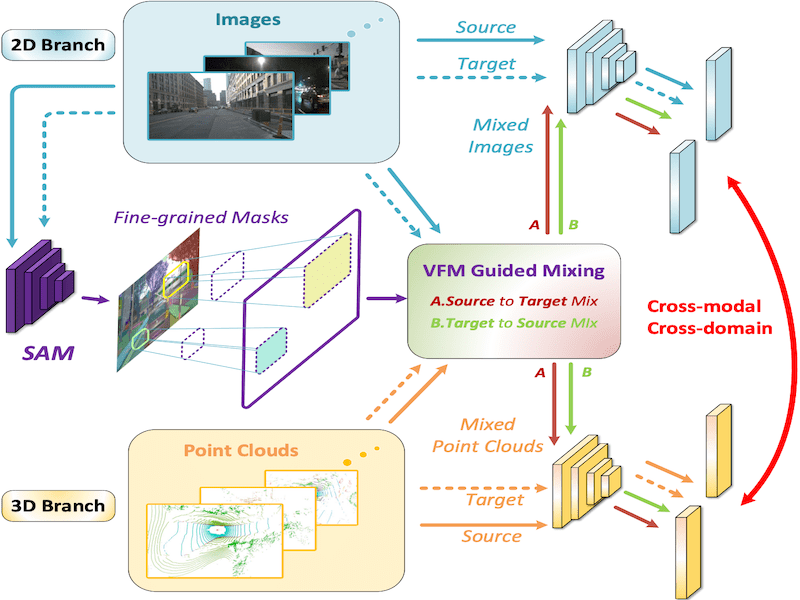
Visual Foundation Models Boost Cross-Modal Unsupervised Domain Adaptation for 3D Semantic Segmentation
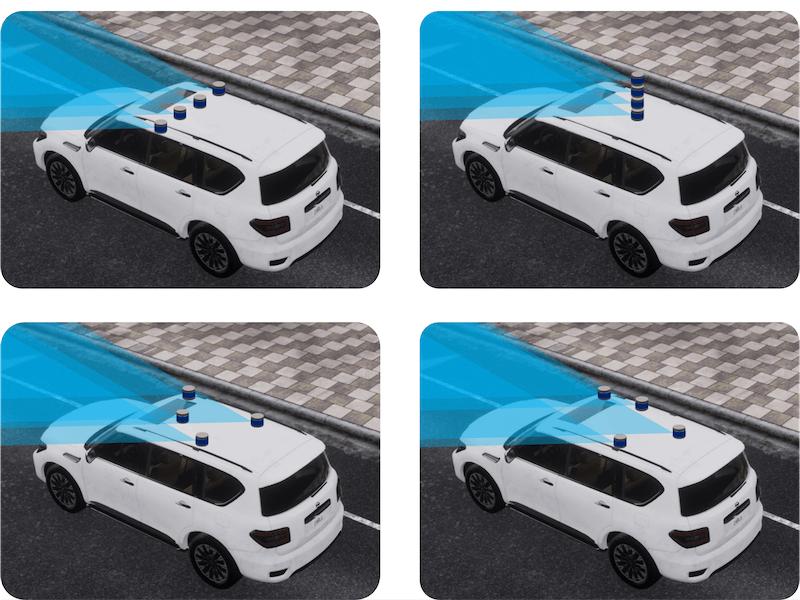
Is Your LiDAR Placement Optimized for 3D Scene Understanding?
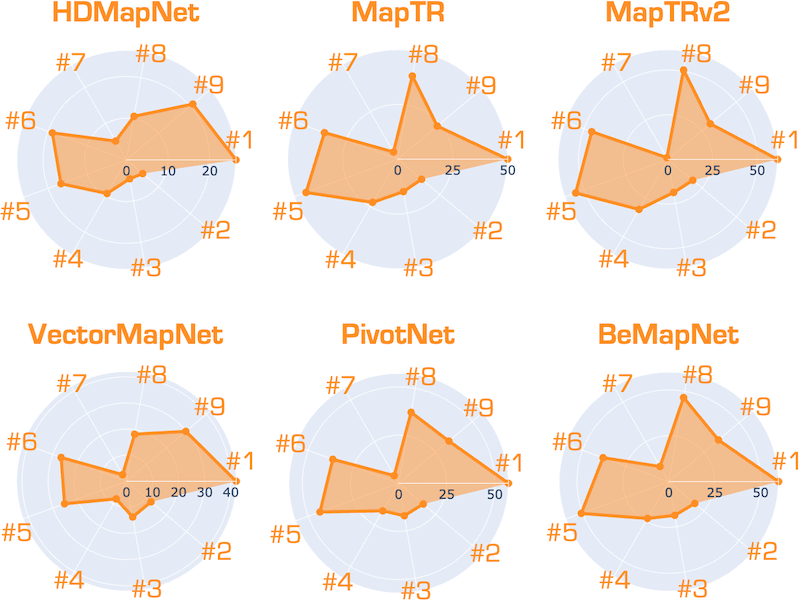
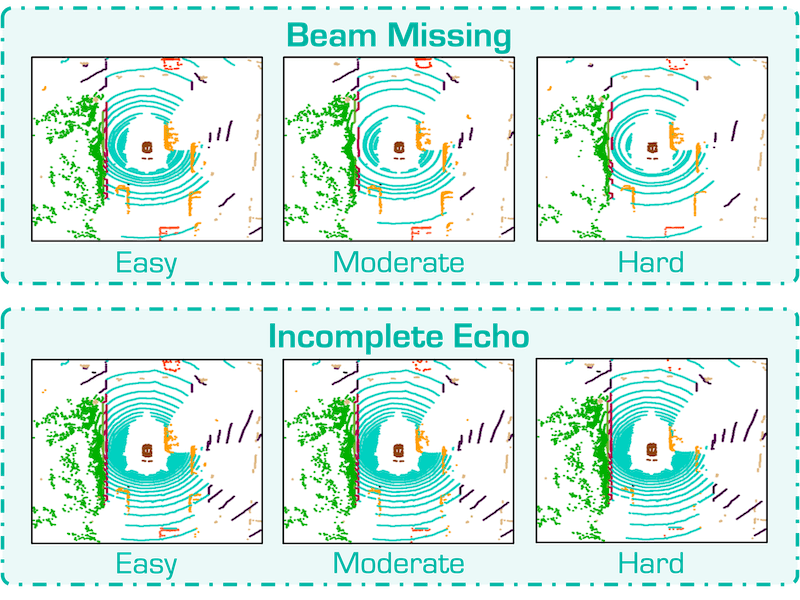
Is Your HD Map Constructor Reliable under Sensor Corruptions?
Learning to Adapt SAM for Segmenting Cross-Domain Point Clouds
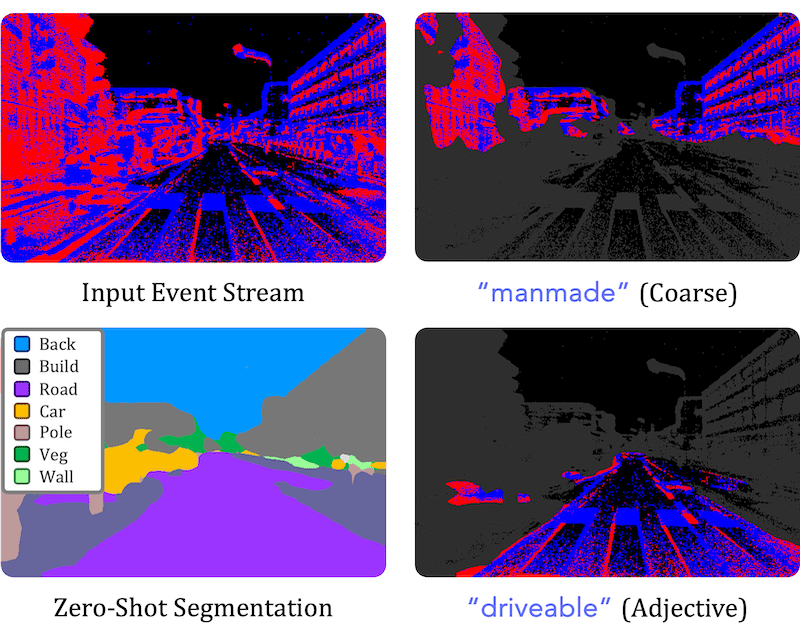
OpenESS: Event-Based Scene Understanding with Open Vocabularies
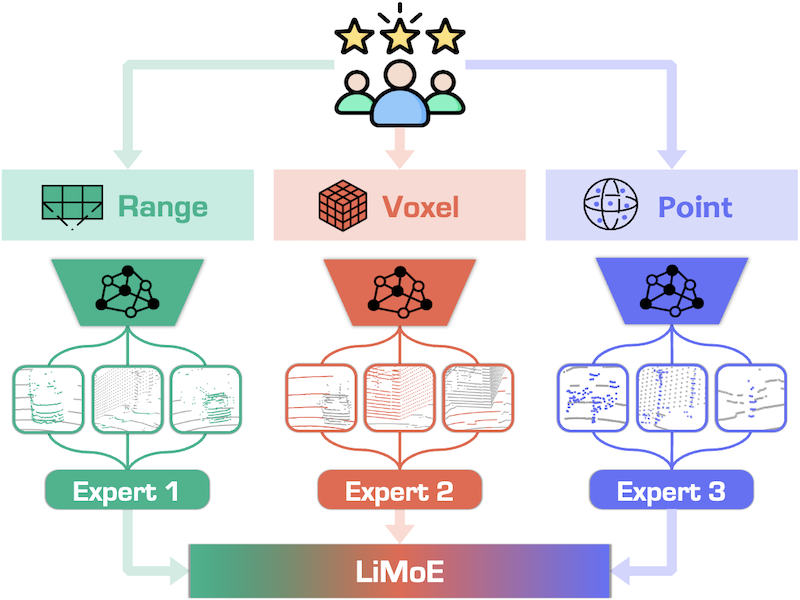
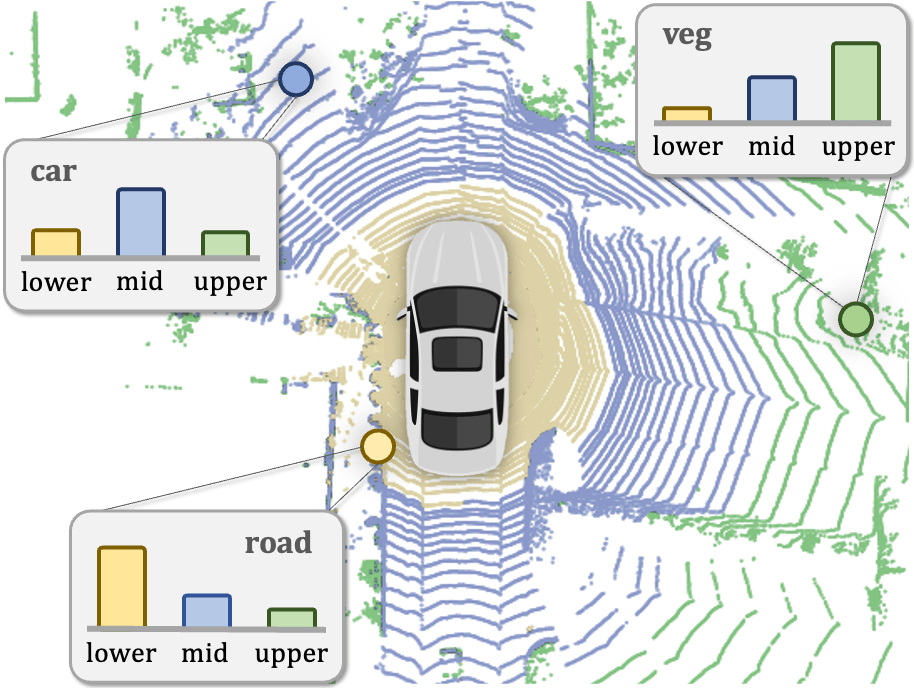
Multi-Space Alignments Towards Universal LiDAR Segmentation
Unified 3D and 4D Panoptic Segmentation via Dynamic Shifting Networks
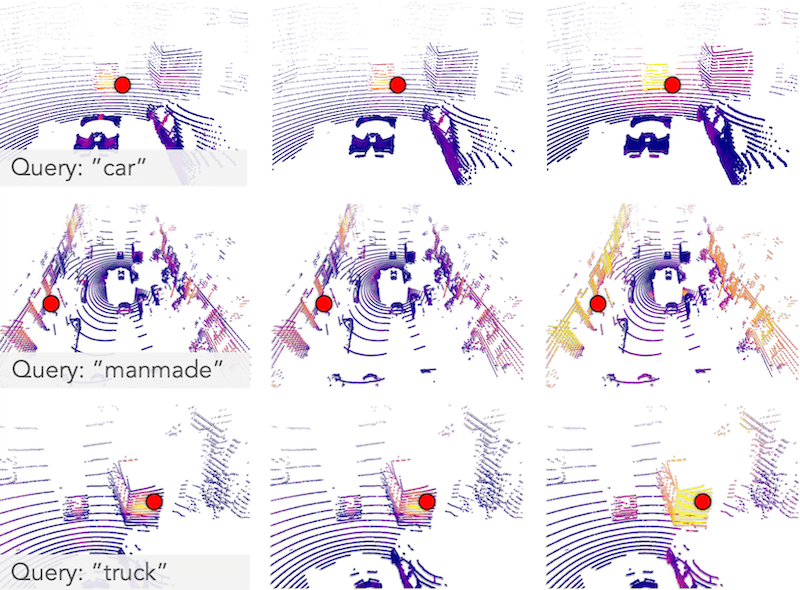
Towards Label-Free Scene Understanding by Vision Foundation Models
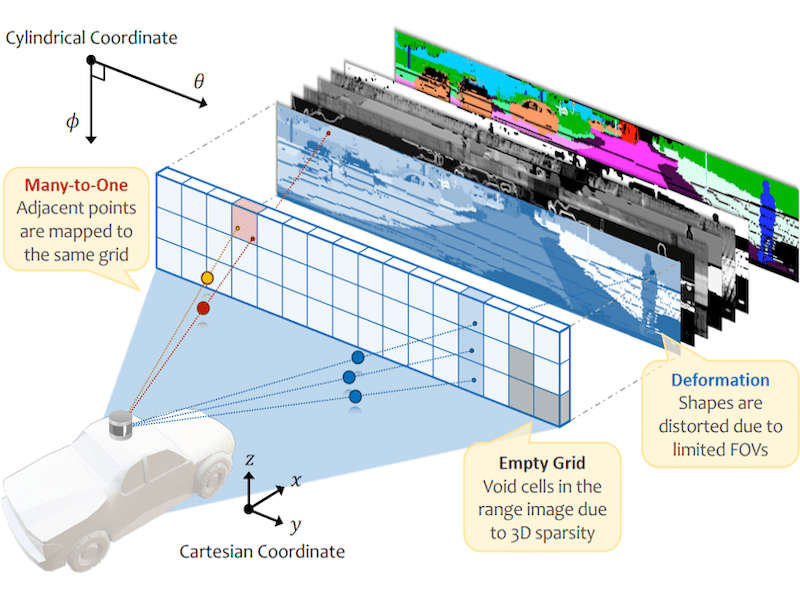
Rethinking Range View Representation for LiDAR Segmentation
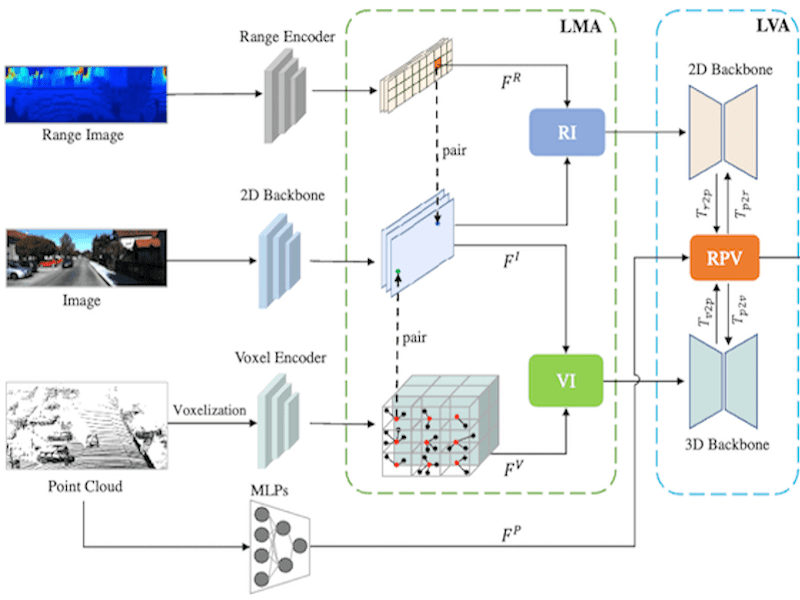
UniSeg: A Unified Multi-Modal LiDAR Segmentation Network and the OpenPCSeg Codebase
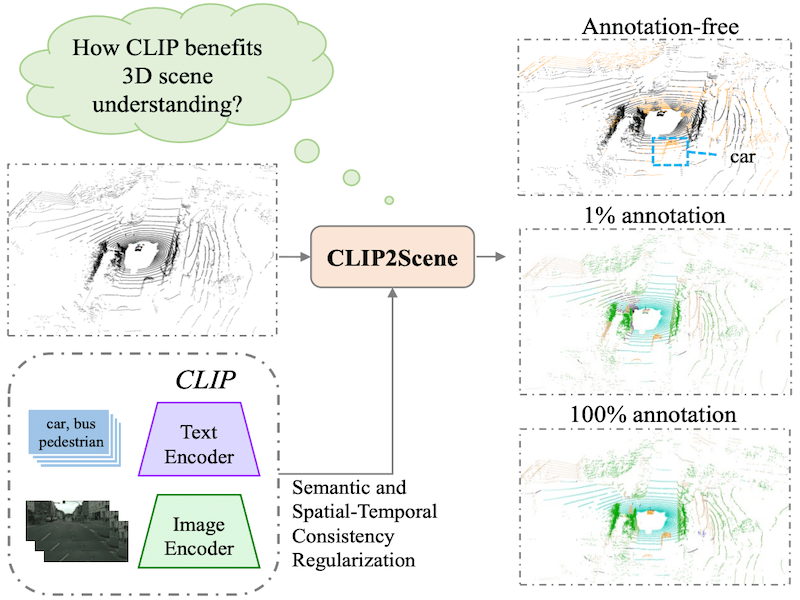
CLIP2Scene: Towards Label-Efficient 3D Scene Understanding by CLIP

ConDA: Unsupervised Domain Adaptation for LiDAR Segmentation via Regularized Domain Concatenation
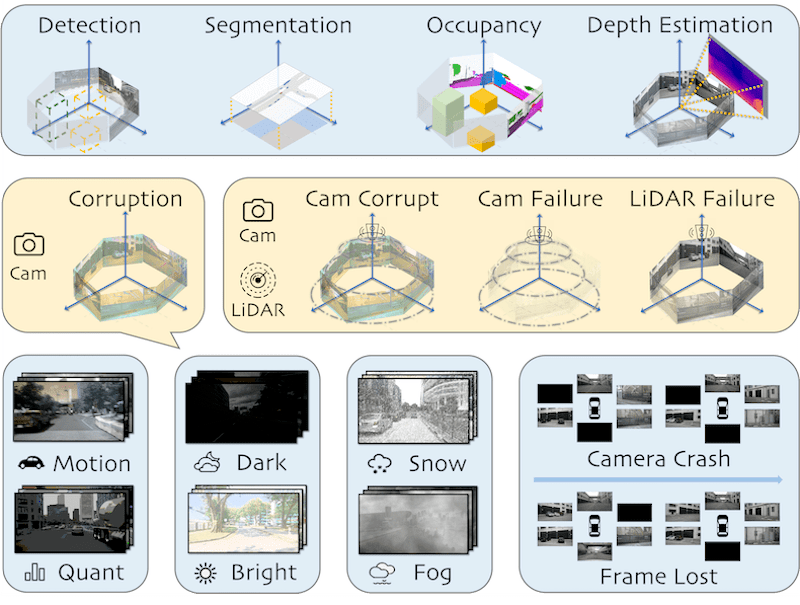
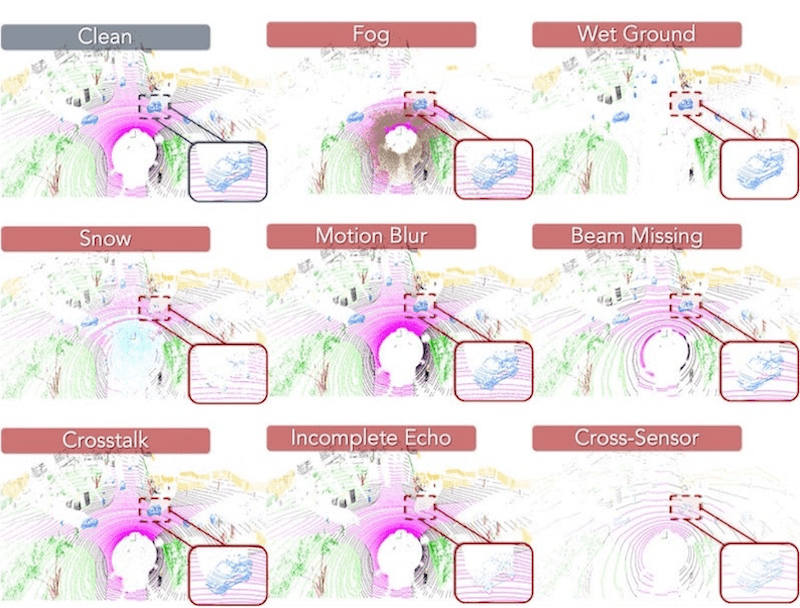
Benchmarking 3D Robustness to Common Corruptions and Sensor Failure
Tech Reports

Workshop Organizers
Academic Services
Conference Reviewer
- IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR)
- IEEE/CVF International Conference on Computer Vision (ICCV)
- IEEE/CVF Winter Conference on Applications of Computer Vision (WACV)
- European Conference on Computer Vision (ECCV)
- Conference on Neural Information Processing Systems (NeurIPS)
- International Conference on Learning Representations (ICLR)
- International Conference on Machine Learning (ICML)
- IEEE International Conference on Robotics and Automation (ICRA)
- IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
- AAAI Conference on Artificial Intelligence (AAAI)
Journal Reviewer
- International Journal of Computer Vision (IJCV)
- International Journal of Robotics Research (IJRR)
- IEEE Transactions on Pattern Analysis and Machine Intelligence (TPAMI)
- IEEE Transactions on Neural Networks and Learning Systems (TNNLS)
- IEEE Transactions on Intelligent Vehicles (TIV)
- IEEE Transactions on Intelligent Transportation Systems (TITS)
- IEEE Transactions on Circuits and Systems for Video Technology (TCSVT)
- IEEE Transactions on Multimedia (TMM)
- IEEE Transactions on Knowledge and Data Engineering (TKDE)
- IEEE Robotics and Automation Letters (RA-L)
- ISPRS Journal of Photogrammetry and Remote Sensing (P&RS)